康奈尔大学的微型机器人技术的遗产继续展开,并重新折叠和再次展开。
最新的新产品是一种尺寸小于1毫米的机器人,它被打印成二维六边形的“元片”,但只要电击一下,它就会变形成预先设定好的3D形状,并能爬行。
这款机器人的多功能性源于一种基于kirigami的新颖设计,kirigami是折纸的一种近亲,在这种设计中,材料上的切片(日语中的“kiru”意为“切割”)使其能够折叠、扩展和移动。
该团队的论文《电子可配置微观元片机器人》发表在9月11日的《自然材料》杂志上。该论文的共同主要作者是博士后研究员刘庆坤和王伟博士。“24。
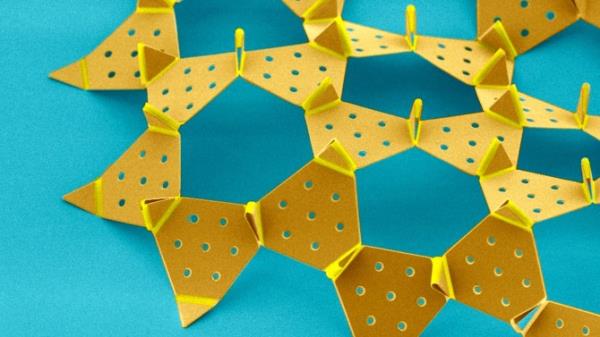
kirigami机器人是一个六角形的瓷砖,由大约100块二氧化硅面板组成,通过200多个驱动铰链连接在一起。
该项目由艺术与科学学院(A&S)物理学教授伊塔伊·科恩(Itai Cohen)领导,他的实验室此前已经开发出了微型机器人系统,这些系统可以驱动四肢,通过人造纤毛抽水,并自主行走。
kirigami机器人是这种进化的下一步,是与John A. Newman物理科学(A&S)教授Paul McEuen长期合作的结果;哈达斯·克雷斯-加齐特,康奈尔大学工程学院Geoffrey S.M. Hedrick教授;Nicholas Abbott, Tisch大学Robert F. Smith化学与生物分子工程学院教授;康奈尔大学工程学院IBM工程学教授Alyssa Apsel;以及康奈尔大学工程学院Samuel B. Eckert工程学教授David Muller,他们都是这篇论文的共同作者。
从某种意义上说,kirigami机器人的起源受到了“可以改变形状的生物体”的启发。刘说。“但是当人们制造机器人时,一旦它被制造出来,它可能能够移动一些肢体,但它的整体形状通常是静态的。所以我们做了一个元表机器人。‘meta’代表着超材料,这意味着它们是由许多构建块组成的,这些构建块共同作用,赋予材料其机械行为。”
王说,这种超材料通常可以被设计成具有天然材料难以达到的性能。
机器人是一个六角形的瓷砖,由大约100块二氧化硅面板组成,这些面板通过200多个驱动铰链连接在一起,每个铰链约10纳米薄。当通过外部电线进行电化学激活时,铰链形成山折和谷折,并张开和旋转面板,允许机器人改变其覆盖区域,局部扩张和收缩高达40%。根据哪个铰链被激活,机器人可以采用各种形状,并可能将自己包裹在其他物体上,然后将自己展开成一张平板。这就是kirigami的巧妙之处。
科恩说:“在折纸中,如果你想创造三维形状,通常你必须把多余的材料隐藏在你正在制作的3D物体中。”“但有了kirigami,你不需要隐藏任何东西。当然,它不是一个连续的薄片,所以上面有洞,但你不会损失任何材料。这是一种更有效的生成三维形状的方法。”
在微观尺度上制造这种机器是一个漫长而复杂的过程,从弄清楚如何将电线穿过各种铰链,到确定机器人的软性和刚性的理想平衡,以制造和保持其形状。最重要的挑战之一是如何设计一种方法,让这么多运动部件自己运动。
“当你有一个基利伽米床单,你有数百个潜在的接触点与地面。因此,在很长一段时间里,我们对机器人的哪些部分接触地面使机器人移动感到困惑,”博士后研究员和合著者杰森·金说。

研究人员在美国的自由女神像的手臂和身体的一部分上包裹了一个毫米级的薄片。metabot改变了自己的形状,以适应雕像的轮廓。
Kim最终意识到,如果不使用摩擦,而是通过改变形状让机器人在环境中游动,力就会变得更加一致。当然,在微观尺度下游泳和在游泳池里游泳是非常不同的。在这种规模下,它更像是在一桶蜂蜜中游泳。
Kim说:“通过改变机器人的形状,使不同部位在游泳步态的不同时刻更接近地面,我们可以可靠地利用流体阻力推动薄片前进。”
科恩说,这是制造微型机器人的独特之处之一。“微观尺度下的运动物理学通常不同于宏观尺度下的机器人运动物理学。”
Cohen的团队已经在考虑元表技术的下一阶段。他们希望将柔性机械结构与电子控制器结合起来,创造出超灵敏的“弹性”材料,这种材料的性能在自然界中是不可能实现的。应用范围可以从可重构的微型机器到小型化的生物医学设备和材料,这些设备和材料可以以接近光速而不是声速对撞击做出反应。
“因为每个建筑模块上的电子设备都可以从光中获取能量,所以你可以设计一种材料,以编程的方式对各种刺激做出反应。当受到刺激时,这些材料不会变形,而是会‘逃跑’,或者以比它们所经历的更大的力量反击,”科恩说。“我们认为,这些活跃的超材料——这些弹性材料——可以构成一种新型智能物质的基础,这种物质受物理原理的支配,超越了自然界的可能性。”
共同作者还包括博士后研究员Itay Griniasty;迈克尔·雷诺兹,硕士”17日,博士。“21;Michael Cao '14;以及博士生Himani Sinhmar, Jacob Pelster和Paragkumar Chaudhari。
这项工作得到了美国国家科学基金会新兴前沿研究与创新计划(EFRI)的支持;陆军研究办公室;康奈尔材料研究中心,由NSF的MRSEC项目支持;空军科学研究办公室;以及康奈尔纳米科学Kavli研究所。研究人员利用了康奈尔纳米级设施,它是由美国国家科学基金会和康奈尔生物技术研究所支持的国家纳米技术协调基础设施的成员。
本文来自作者[admin]投稿,不代表艺茂荟荣立场,如若转载,请注明出处:https://m.yimaoxinxi.cn/keji/202506-2317.html
评论列表(4条)
我是艺茂荟荣的签约作者“admin”!
希望本篇文章《微型Kirigami机器人折叠,在3D中爬行》能对你有所帮助!
本站[艺茂荟荣]内容主要涵盖:国足,欧洲杯,世界杯,篮球,欧冠,亚冠,英超,足球,综合体育
本文概览: 康奈尔大学的微型机器人技术的遗产继续展开,并重新折叠和再次展开。 最新的新产品是一种尺寸小于1毫米的机器人,它被打印成二维六边形的“元片”...